
- 3 系统组成
- ▪ 能源系统(Power Supply System)
- ▪ 悬浮系统(Suspension System)
- ▪ 推进系统(Propulsion System)
- ▪ 控制与安全系统(Control and Safety System)
- ▪ 导向系统(Guidance System)
- 4 关键技术
- ▪ 电磁力悬浮(EMS)
- ▪ 电动力悬浮(EDS)
- ▪ 永磁性
- 5 主要分类
- ▪ 电磁悬浮列车(Electromagnetic Suspension,EMS)
- ▪ 电动感应悬浮列车(Electrodynamic Suspension,EDS)
- ▪ SC-EDS型磁悬浮列车
- ▪ PM-EDS型磁悬浮列车
- ▪ PM-EMS型磁悬浮
- ▪ 暗轨/吊轨永磁补偿式磁悬浮列车
- 6 运营情况
- ▪ 中国
- ▪ 日本
- ▪ 美国
- ▪ 巴基斯坦
- ▪ 德国
- ▪ 其他国家的规划
- 7 发展趋势
- ▪ 超高速真空管道磁悬浮
- ▪ 超级高铁(Hyperloop)
- 8 参考资料
磁浮列车(Maglev),又称为磁悬浮列车,是一种基于磁力原理的轨道交通系统,它在传统轮轨交通系统的基础上去除或减弱了轮轨系统的作用。磁浮列车利用电磁、超导或永磁等磁力,根据磁极之间的“同性相吸、异性相斥”原理,克服列车的重力和导向力,使列车与轨道之间达到平衡状态,几乎没有明显的机械接触(某些类型的磁浮列车可能在供电弓形轨或导向轮方面有轻微的机械接触)。同时,磁浮列车一般采用直线电机进行驱动。
磁浮列车的世界简史可以追溯到1750年,当时科学家约翰·米切尔(John Miehell,英国人1724一1793)发现了磁铁之间的斥力现象,但并未解释其原因。直到1831年,法拉第(Michael Faraday)发现了电磁感应现象,为磁浮列车技术的出现奠定了理论基础。然而,在早期阶段,磁浮列车的概念还只停留在纸面上。

赫尔曼·肯佩尔专利
到了1904年,罗伯特·戈达德(RobertGoddard)提出了通过电磁排斥力让列车悬浮在路基上的设想,但缺乏实用性。1912年,法国工程师埃米尔·巴切莱特(EmileBachelet)申请了一项磁浮轨道车的专利,其中使用了螺线管和交流电磁铁来产生悬浮力和推动力,但由于电能需求太大而不切实际。
然而,真正推动磁浮列车技术从概念到实际应用的是赫尔曼·肯佩尔(Hermann Kemper)。1922年,肯佩尔开始研究磁浮列车,并在1934年获得了一项名为“没有轮子的单轨车辆”的专利,其中采用了直线电机技术。肯佩尔的研究为德国和日本在磁浮技术领域开辟了新的研究领域,奠定了基础。
然而,磁浮技术的发展在第二次世界大战后陷入停滞,直到1969年,德国重新开始磁浮技术的研发,并在1970年代至1980年代间,由蒂森·亨舍尔公司领导,推出了一系列的磁浮列车系统,称为“Transrapid”。
在美国,詹姆斯·鲍威尔和戈登·丹比是磁浮技术的先驱,他们在1966年发表了有关超导磁悬浮的论文,提出了利用超导磁体产生的磁场来悬浮和推动列车的概念尽管詹姆斯·鲍威尔(James Powell)和戈登·丹比提出了超导磁悬浮的概念,但美国在磁浮列车技术的研发上并没有取得重大进展。他们长期游说美国政府支持磁浮列车技术的研究和建设,但未能引起足够的关注和资金支持。
相比之下,日本和德国在磁浮列车技术的发展上取得了重要的进展。日本的超导高速磁浮列车技术成为全球关注的焦点,其在1989年推出的第一代磁浮列车开始商业化运营,并逐步完善了九代产品。上海磁浮交通引进了德国的磁浮技术并实现了商业化应用,成为全球首个商业运营的磁浮列车系统。
中国磁浮列车发展史
中国在1989年开始进行磁悬浮交通系统的研究,并取得了一系列的重要里程碑。在1991年,中国自行研制的第一辆磁悬浮列车在国防科技大学试验成功。随后,中国不断进行技术突破,包括研制出了可载人的常导低速磁悬浮车和全尺寸磁悬浮车。
2001年,中国与德方联合体合作修建了上海高速磁浮示范线,该线路于2003年进行试运营。中国也在2006年建成了首条中低速磁悬浮线路,并在2009年通过验收。在2012年,中国自主研制的中低速磁浮列车“追风者”下线,并成为世界第四个能够自主研制中低速磁浮列车的国家。
中国还在进行其他磁浮技术的研究,包括速度可达140km/h的磁悬浮列车和高速磁浮交通系统技术。2016年,长沙磁浮快线开始运营,而2017年,中国首个中低速磁浮交通示范线正式商业运营。此外,中国还在研究超导磁浮和超导电动悬浮技术,并取得了重要进展。
中国磁浮列车技术申请了大量专利,全球排名第一。最近的发展是中国在2023年完成了国内首套高温超导电动悬浮全要素试验系统的首次悬浮运行,这对于推动超导电动磁浮交通系统工程化应用具有重要意义。
2023年12月4日,中国科技部发布《对十四届全国人大一次会议第2199号建议的答复》,表示在“十三五”期间,已攻克了时速600公里高速磁浮列车核心技术,将依托“十四五”国家重点研发计划,继续支持高速磁浮交通系统工程化技术与运营系统集成技术攻关,研究形成时速600公里高速磁浮试验线方案和商业运营成套解决方案,为中国高速磁浮交通发展提供科技支撑。
日本磁浮发展史
日本在20世纪60年代初期开始磁浮车的研究,并在60年的探索中积累了实用化的基础技术。日本主要研究的磁浮列车形式包括电磁悬浮和超导电动悬浮。日本航空公司最早采用德国Kruss-Maffei公司技术进行磁悬浮技术的研究。
在1975年,日本航空公司推出了HSST-01型磁浮试验车辆,并在1978年在东扇岛试验线上达到307。8km/h的试验速度。随后,推出了HSST-02型、HSST-03型和HSST-04型磁浮试验车辆,各自在技术和车体机械支承装置方面进行了不断的改进和展示。在HSST-05型磁浮试验车辆研制成功后,于1989年在横滨国际展览会上进行了展示。此外,日本还研制了适用于低速运行的HSST-100S型磁悬浮列车,并在大江线上进行了面向应用的试验。在HSST-100S型磁悬浮列车的基础上,推出了HSST-100L型加长型样车。2005年,以HSST-100L为基础的东部丘陵线(Linimo线)开始运营,设计最高速度为100km/h。
此外,日本国有铁道(JNR)长期致力于高速超导电动悬浮列车的研究。JNR于1972年研制成功了ML100原理车,并于1979年创造了世界纪录的不载人运行速度为517km/h。随后,在1990年开始修建山梨试验线,并于1997年实现了MLX01型列车不载人运行速度达到550km/h的纪录。
2015年4月,日本在山梨试验线上的低温超导电动磁浮L0系车型实现了载人603km/h的世界纪录。
德国磁浮列车发展史
除了以日本HSST为代表的中低速电磁悬浮技术,还存在一种高速电磁悬浮技术,其最显著的区别在于导向系统。中低速电磁悬浮技术没有独立的导向系统,当车体发生横移时,悬浮磁场会产生畸变,依靠电磁吸引力产生横向恢复分力以抵抗偏移,但导向能力有限。而高速电磁悬浮技术则包含独立的导向系统,通常采用长初级驱动来实现导向。德国的TR(Transrapid)是高速电磁悬浮技术的代表。
德国在磁浮技术领域经过50年的努力,技术已经达到成熟阶段。在1969年,Kruss-Maffei(KM)公司推出了电磁悬浮模型车TR01。随后,在1971年推出了TR02,并进行了试验,该车重达11。3吨,试验速度达到164km/h。在1975年,Thyssen Henschel公司首次将悬浮和直线驱动集成到一个单元中,开发了新型磁浮试验列车TR05,该型号具备更高的速度潜力。接着,在次年该公司建设了试验基地,并开始研发面向实际应用的试验车TR06。在1982年,TR06在埃姆斯兰试验线(Transrapid Versuchsanlage Emsland,TVE)上进行了试验。在1988年,TR06的速度达到了413km/h。1993年,TR07型磁浮列车在TVE试验线上的最高速度达到450km/h。2003年,TR08列车在上海磁浮线上达到了501km/h的最高试验速度。2009年,TR09新型磁浮列车在TVE试验线上进行了测试,最高速度达到550km/h。
其他
韩国在磁浮技术方面参考了日本HSST技术,并于2016年2月开通了仁川机场至仁川龙游站的磁悬浮线路。这条线路是韩国的首个商业化运营的磁悬浮项目,标志着韩国在磁浮交通领域取得了重要进展。与此同时,美国则关注于永磁悬浮技术,并将其应用于短途线路。一个例子是美国的试验车MagTube项目,该项目采用永磁悬浮技术。永磁悬浮技术利用永久磁铁产生悬浮力和导向力,而不需要外部电源供电。这种技术在短途线路上具有潜力,可以提供高速、高效和环保的交通解决方案。韩国和美国在磁浮技术领域的研究和应用表明,磁浮交通在全球范围内引起了广泛的关注,并且不同国家在技术选择和应用方面有着自己的特色和发展方向。这些国家的努力为磁浮交通的发展和创新提供了多样性和推动力。

韩国EcoBee磁悬浮线
除了日本的低温超导电动磁悬浮列车,美国劳伦斯利弗莫尔国家实验室的科学家研发了一种名为Inductrack的永磁电动磁悬浮系统。该系统利用轨道上的无源线圈和列车上的永久磁铁(排列成Halbach阵列)之间的作用实现磁悬浮。
Inductrack方案采用无源线圈而非传统的主动电磁悬浮系统,这使得系统更为简化和经济高效。当列车运行时,无源线圈中的变化磁场会感应出列车上永久磁铁的电流,产生一个反向的磁场来抵消列车的重力和提供悬浮力。由于无源线圈无需外部电源供电,这种系统具有较低的能耗和运营成本。
Inductrack方案在永磁电动磁悬浮技术中具有潜力,尤其适用于中低速短程交通线路。该技术的特点在于其简化的结构和低成本,为城市交通和轻轨交通提供了一种具有吸引力的解决方案。
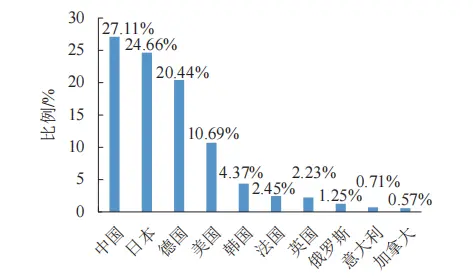
磁悬浮专利前10的国家
悬浮
悬浮是磁悬浮列车的核心原理,通过磁力实现列车与轨道之间的无接触悬浮。电磁悬浮控制系统作为磁悬浮列车的核心技术之一,其控制性能的好坏是磁悬浮列车安全稳定运行的关键。通常使用电磁悬浮(Electromagnetic Suspension,EMS)或电动感应悬浮(Electrodynamic Suspension,EDS)技术。EMS系统利用电磁铁产生的吸引或斥力将列车悬浮在轨道上,采用悬浮电磁铁与长定子轨道构成的直线同步电机驱动,通过调整电磁铁的电流控制悬浮高度。EDS系统则利用变化的磁场在导体中产生感应电流,产生与轨道上的磁场相互作用的力,实现列车的悬浮。超导型磁悬浮列车系统利用超导磁体和铝环线圈实现车体悬浮,其中超导磁体产生的磁场与轨道上的铝环线圈相互作用,产生排斥力,使车体悬浮并保持稳定间隙。超导体的电阻极低,能够产生大电流,实现较高的悬浮高度(通常约100毫米)。当车厢向下移动时,感应电流增加,排斥力增强,使车辆返回原位,维持间隙的稳定。在静止状态下,车辆依靠陆轮支撑,只有当达到一定速度(通常约100公里/小时)时,才能产生足够强的反磁场使列车悬浮。超导型磁悬浮列车的运行速度可超过500公里/小时。
导向
磁悬浮列车需要保持在轨道中心位置,以确保稳定行驶和避免偏离。磁悬浮导向系统通过调整磁力的作用,使列车保持在轨道中心位置。一种常见的导向系统是通过在列车和轨道之间放置导向磁铁或导向电磁铁来实现。磁悬浮列车的导向系统依靠导向电磁铁提供的侧向力来实现。在列车底部安装的导向电磁铁通过与铁磁轨道之间的相互作用力,确保车辆与导轨两侧的间隙相等。当列车偏离轨道时,通过调整导向电磁铁的电流大小来调整侧向间隙,从而实现导向的目的。导向电磁铁的作用是让列车保持稳定的轨道位置,防止偏离或发生意外。它是导向系统的重要组成部分,确保列车在高速运行时保持良好的稳定性和安全性。
推进
磁悬浮列车需要一种推进力来驱动列车沿轨道前进。常用的推进方法是利用线性电动机(Linear Motor)。线性电动机沿着轨道布置,通过产生变化的电磁场与列车上的电动机进行相互作用,产生推进力。磁悬浮列车的驱动系统利用直线电动机的原理来推动列车运行。通过在车辆底部安装电磁线圈和在地面轨道内侧安装移动磁场绕组,产生的磁场与转子相互作用,从而推动列车进行直线运动。这种驱动方式有两种类型:长定子短转子的同步直线电动机驱动和长转子短定子的异步直线电机驱动。
在同步驱动中,电磁线圈作为定子绕组,通过电磁感应产生的磁场推动转子转动,进而推动列车运行。这种驱动方式适用于高速运行,因为地面直接向固定轨道供电。
另一种异步驱动方式中,定子线圈安装在车辆底部,转子线圈安装在轨道上。通过受电弓向定子绕组供电,产生的磁场与转子相互作用,推动列车运行。由于受电弓的速度限制,这种驱动方式适用于低速运行。
动能管理
磁悬浮列车在高速行驶过程中会产生大量的动能,需要有效地管理和利用。制动系统用于控制列车速度和回收制动能量。一种常见的制动方法是通过利用电磁感应原理,将动能转化为电能并回馈到电网中。
能源系统(Power Supply System)
磁悬浮列车,也被称为线性电机列车,是通过利用线性电机原理进行驱动的。如果将一个普通的圆柱形电动机剖开并展开成一个平面,就得到了线性电机的结构。将电动机的定子绕组延展成类似于铺设在地面上的轨道和枕木,而列车的底部装有铝板,充当转子的角色。当轨道上的绕组通电时,列车将受到电磁力的作用。磁浮轨道系统是一种运用“同性相斥、异性相吸”的电磁原理、依靠电磁力使车厢悬浮并行走的轨道运输方式,有常导和超导两种类型。常导式磁浮,运行速度较低,用感应线性电机来驱动。这个电磁力可以分解为垂直和水平于轨道方向的两个分力。垂直分力使列车浮起,实现悬浮状态;水平分力则是列车前进的动力,推动列车在轨道上以高速滑行。这种基于线性电机工作原理的列车就是我们所称的磁悬浮列车。
通过线性电机的驱动,磁悬浮列车实现了无接触的悬浮和驱动,从而具有较低的摩擦和阻力。这使得磁悬浮列车能够以高速、平稳、高效的方式运行。
悬浮系统(Suspension System)
磁悬浮列车利用磁力将列车悬浮在轨道上,而不需要使用传统的轮轨系统。主要有两种悬浮技术:电磁悬浮系统(EMS)和电动悬浮系统(EDS)。EMS系统通过在列车和轨道之间产生电磁力来实现悬浮。EDS系统则利用轨道上的磁场和列车上的导电材料之间的相互作用来实现悬浮。
推进系统(Propulsion System)
磁悬浮列车需要一种推进机制来使列车前进。EMS系统的一种常见方法是在列车上安装线性电机,通过电流在线性电机中产生磁场,从而推动列车前进。EDS系统则需要其他技术来提供推进力,例如在轨道上安装推进线圈的线性电机。
控制与安全系统(Control and Safety System)
由于磁悬浮列车实际上是在“贴地飞行”,因此需要对俯仰、横摇和偏航进行稳定控制。为了实现稳定性,磁悬浮系统使用动态的磁场来进行稳定控制。EMS系统通过不断测量列车与轨道之间的间隙距离,并相应地调整电磁体的电流来实现主动稳定控制。EDS系统则利用变化的磁场来产生感应电流,从而实现被动稳定控制。
导向系统(Guidance System)
磁悬浮列车需要一种导向系统来保持列车在正确的轨道上运行。一种常见的导向系统是使用空流系统,也称为空磁通系统。常导高速磁浮列车实现了牵引和悬浮的一体化,采用长定子直线同步电机作为驱动系统,并通过导向电磁铁与感应板之间的电磁感应来实现导向功能。
电磁力悬浮(EMS)
电磁力悬浮技术通过利用轨道上的电磁场和列车上的导电体之间的相互作用来实现悬浮和导向。列车通过自身的电流产生的磁场与轨道上的磁场相互作用,从而实现悬浮和稳定导向。EMS技术具有较低的磁场强度,可以实现较高的时速,且造价相对较低。高速磁悬浮列车主要通过利用电磁力来实现悬浮,并由直线电机驱动车辆进行运行。相对于传统的轮轨接触式列车,磁悬浮列车在运行功耗、振动、噪声等方面具有明显的优势,因此被认为是未来轨道交通发展的趋势。
电动力悬浮(EDS)
电动力悬浮技术使用列车上的电动力产生磁场,与轨道上的永久磁体相互作用,实现悬浮和导向。通过将电能转化为机械动能,列车产生的磁场与轨道上的磁场相互作用,实现悬浮和推进。EDS技术具有较高的磁场强度,能够实现更高的时速和较大的载荷能力。磁浮列车的超导电磁铁与轨道线圈形成的磁场之间可能产生排斥力,磁铁安装在磁浮列车车体底部和两侧反向转向的顶部.
永磁性
永磁性EDS技术采用永磁体替代传统的电磁体,用于产生轨道上的磁场。列车上的导电体与轨道上的永磁体相互作用,实现悬浮和导向。这种技术不需要外部电力供应,具有故障安全防护系统,能够在低速时产生足够的磁场使列车悬浮。然而,在停车时,仍需要轮或轨道的一段来继续运动。
这些关键技术的不同应用使得磁浮列车具有不同的特点和适用范围。EMS技术适用于中低速磁浮列车,具有较低的磁场强度和造价相对较低的特点。EDS技术适用于高速磁浮列车,具有较高的磁场强度和较大的载荷能力。永磁性EDS技术则是一种新型的悬浮技术,具有故障安全性和不需要外部电力供应的特点。
以下七条磁悬浮试验/示范/商业运营线(除去永磁补偿式磁悬浮)为代表,对磁悬浮轨道交通的技术特征总结。
七条典型磁悬浮轨道交通运营线技术特征简表
|
磁悬浮线路 / 系统 |
类型 |
最高时速 / ( km / h) |
磁悬浮高度 / mm |
载重比 造价比 导向 / (t/m) /(亿元/km) 方式 |
驱动 方式 |
电机类型 |
应用特点 |
||
|
中国长沙 中低速 磁悬浮线 |
EMS 型 |
100 ( 运行时速) |
8 ~ 10 |
被动 ≈2 ≈2。3 导向 |
列车 驱动 |
短定子 直线感 应电机 |
载重低,时速低,适合 城内、短途载客交通 |
||
|
中国上海 高速磁 悬浮线 |
EMS 型 |
430 ( 运行时速) |
8 ~ 10 |
电磁 ≈2。06 ≈3 主动 导向 |
导轨 驱动 |
长定子 同步直 线电机 |
载重低,时速较高,适 合城间、远距离载客交 通 |
||
|
日本新干 磁悬浮线 |
SC-EDS 型 |
603 ( 测试时速) |
100 ~ 150 |
≈3。52 ≈12。3 |
被动 导向 |
导轨 驱动 |
长定子 同步直 线电机 |
载重比较高,时速高, 但造价高,运行损耗 大,适合城间、远距离 载客交通 |
|
|
美国磁悬浮 飞机试验线 |
550 ( 设计时速) |
80 ~ 150 |
≈3。5 ≈1。65 |
被动 导向 |
导轨 驱动 |
永磁同 步直线 电机 |
载重相对较高,时速 高,造价较低,适合城 间、远距离载客交通 |
||
|
西南交通大学 高温超导 磁悬浮 试验平台 |
HTSP Maglev 型 |
50 ( 测试时速) |
10 ~ 30 |
- - |
导轨 驱动 |
长定子 直线感 应电机 |
尚处于研究测试阶段, 其时速、载重和造价等 参数不宜比较 |
||
|
M3 磁悬浮 系统 |
90 ~ 160 ( 设计时速) |
15 ~ 20 |
<2 1。5~1。8 |
主动 导向 |
导轨 驱动 |
长定子 同步直 线电机 |
载重比和时速较低,但 列车编组灵活,模式多 样,智能化调度,适合 城内、短距离载客交通 |
||
|
迪拜超级 高铁试验线 - 1 000 ( 设计时速)
|
100 ~ 150 |
被动 ≈1 ≈8。8 导向 |
导轨 驱动 |
永磁同 步直线 电机 |
载重低,时速超高,适 合大距离载客交通,技 术尚处于研究阶段 |
||||
电磁悬浮列车(Electromagnetic Suspension,EMS)
电磁悬浮(EMS)型磁浮列车是一种常见的轨道交通应用,包括德国的TR系列高速磁浮列车、日本的HSST系列中低速磁浮列车、中国的高速和中低速磁浮列车以及韩国的中低速磁浮列车。高速磁悬浮列车通常以时速超过400公里/小时运行,而中低速磁悬浮列车的时速一般在120公里/小时以下。
EMS型磁浮列车依赖悬浮电磁铁与轨道之间的吸引力来保持约8~10毫米的列车与轨道间隙,从而实现无接触运行。经过几十年的发展,德国的磁悬浮列车从MBB原理车、TR04样车逐步发展为TR08型和TR09型商业样车,运行速度从100公里/小时提升到500公里/小时,形成了TR系列常导高速磁悬浮列车体系。同时,日本为解决市区与郊区之间的短途客运问题,在研发高速磁悬浮列车的同时,先后研制了HSST-01至HSST-05型磁悬浮列车,其最高运行速度可达100公里/小时,形成了HSST系列常导中低速磁悬浮列车体系。
自1985年起,韩国开始自主开发磁悬浮列车技术,涉及的机构包括韩国机械材料协会、韩国现代Hyundai、韩国大宇Daewoo和韩国轨道公司ROTEM。他们相继研发了HML型磁悬浮列车、UTM型磁悬浮列车和MLV型磁悬浮列车,均属于EMS中低速磁悬浮列车。
中国在磁悬浮轨道交通领域的研究工作起步较晚,从20世纪80年代后期开始研究,但发展速度较快。西南交通大学、国防科学技术大学、中国科学院电工研究所和中国铁道科学研究院联合攻关,相继研发了CMS03型实验样车、CMS03A型工程样车和CMS04实用性工程化样车,运行速度达到110公里/小时,形成了具有自主知识产权的CMS系列常导中低速磁悬浮列车体系。
除了德国、日本、韩国和中国,其他国家如英国、加拿大、美国和前苏联等,在20世纪中期开始研究EMS磁悬浮列车技术。然而,截至目前,中国在2002年底引进德国磁悬浮技术并建成上海磁悬浮线路,仍然是全球唯一商业运营的EMS高速磁悬浮线路。目前全球范围内仍在运营的EMS中低速磁悬浮线路共有四条,包括中国的长沙磁悬浮线路(最高运行速度为100公里/小时,计划于2021年7月提速至140公里/小时)、中国的北京S1号地铁线(最高运行速度为80公里/小时)、日本的名古屋磁悬浮线路(最高运行速度为100公里/小时)和韩国的仁川国际机场线(最高运行速度为110公里/小时)。
电动感应悬浮列车(Electrodynamic Suspension,EDS)
电动感应悬浮列车是一种利用变化的磁场在导体中产生感应电流,从而产生与轨道上的磁场相互作用的力来实现悬浮的系统。 EDS系统利用感应电流产生的力来将列车悬浮在轨道上,实现无接触悬浮。一些磁悬浮列车系统采用了EDS技术,例如德国的Transrapid磁悬浮列车系统。超导电动磁悬浮列车是一种采用EDS(Electro-Dynamic Suspension)磁悬浮技术的列车系统,它具有较大的悬浮间隙(约100毫米),并且悬浮和导向系统采用被动控制方式。EDS型磁悬浮列车主要包括SC-EDS型磁悬浮列车和PM-EDS型磁悬浮列车两种:
SC-EDS型磁悬浮列车
1962年,日本开始研究SC-EDS磁悬浮技术,并成功研发了ML100磁悬浮原理车,其进行了载人测试,时速达到60公里/小时。随后,于1979年,日本国铁研发了ML500R磁悬浮试验车,在宫崎试验线上进行了试跑,空载时速达到了517公里/小时,创造了当时的世界纪录。
接着,于1980年,日本国铁将宫崎试验线的T型轨道更换为U型轨道,并研发出了MLU001磁悬浮样车(进行了载人测试,时速达到400公里/小时)和MLU002N磁悬浮样车(进行了空载测试,时速达到431公里/小时)。1997年,他们研制出了准商业磁悬浮列车MLX01型样车,并在山梨磁悬浮线上进行了载人实验,最高载人测试时速达到531公里/小时,并在1999年进行了时速1003公里/小时的会车实验。
2003年,改进后的MLX01-901样车进行了载人实验,时速达到581公里/小时,并进行了时速1026公里/小时的会车实验,再次刷新了世界纪录。2012年,日本东海铁路公司公布了基于MLX01样车开发的L0系列样车,并计划将其应用于中央新干线的商业运营。2015年,在山梨磁悬浮线上进行了载人测试,时速达到590公里/小时,并进行了载白鼠测试,时速达到603公里/小时。
此外,2014年,日本政府宣布计划在2027年建成东京到名古屋的商业磁悬浮线,计划运行时速为505公里/小时。另外,随着高温超导材料的发现和液氮制冷技术的快速发展,日本在2000年左右将山梨磁悬浮线上的车载低温超导磁体线圈替换成了高温超导Bi系线圈,进行了实验测试,时速达到553公里/小时。然而,最终中央新干线商业磁悬浮线并未采用高温超导Bi系线圈磁体方案。
PM-EDS型磁悬浮列车
PM-EDS型磁悬浮在轨道交通领域的典型应用包括Magplane磁悬浮(又称磁悬浮飞机)和Induc-track磁悬浮。
磁悬浮飞机是一种创新的永磁电动高速轨道交通系统,而非传统意义上的飞机。在1960年,美国科学家Powell和Danby提出了永磁电动式磁悬浮列车方案。随后,麻省理工学院(MIT)基于此方案提出了Magplane的概念,通过利用新型永磁材料制造车载磁体并进行优化设计,致力于开发城内和城间的简捷、高效、低成本和高稳定性的磁悬浮交通系统。在20世纪70年代,美国科学部门按照麻省理工学院的Magplane原理建造了1:25比例的模型,并在100米长的轨道上进行了数百次实验运行和测试。根据美国交通部的要求,他们对800公里的路段进行了工程设计和成本分析。该工程设计于1995年获得采纳,并进行了进一步的研究和分析,以在大型运输系统中进行测试。2002年,美国商业合作银行集团与成都的四家公司合资成立了成都飞美磁悬浮飞机有限公司,计划投资8亿美元建设磁悬浮飞机的生产基地和运营线路。然而,尽管磁悬浮飞机的概念已经提出一段时间,但世界上仍没有任何商业运营的磁悬浮飞机线路。
HTSPmaglev型磁悬浮
1997年,中国和德国联合研制出高温超导磁悬浮模型车,重20kg,磁悬浮高度7mm,轨道直径3。5m。2000年底,西南交通大学王家素团队成功研制了世界首辆载人高温超导磁悬浮试验车“世纪号”,可承载4名乘客,磁悬浮力达6350N,磁悬浮高度大于20mm,轨道长15。5m。2004年,德国IFW研究所成功研制高温超导磁悬浮试验车“SupraTransI”,最大载重350kg,直线轨道长7m。2011年,德国IFW研究所改进完成了第二代高温超导磁悬浮环形实验线“SupraTransII”,可承载2人,环形轨道80m长,速度可达20km/h,最大加速度1m/s2。1998年,巴西里约热内卢联邦大学开始从事高温超导磁悬浮研究,并于2014年修建成长200m的“MaglevCobra”高温超导磁悬浮试验线,可承载24人,车体采用轻质纤维材料以减轻重量。西南交通大学研究团队在“世纪号”的基础之上深入研究,2014年将真空管道技术和高温超导磁悬浮技术相结合,研制成新一代高温超导磁悬浮环形试验线和真空环形轨道高温超导磁悬浮实验系统“Super-Maglev”,该系统采用Halbach型永磁轨道,轨道全长45m,最高车速50km/h。2015年,西南交通大学成功研制了壁挂式高温超导真空管道磁悬浮系统,空载时速82。5km/h。2021年1月,西南交通大学公布了完全由中国自主研发设计、制造的世界首台高温超导高速磁悬浮工程化样车及其实验线,设计时速620km/h。另外,意大利、俄罗斯等国也相继研制出各自的高温超导磁悬浮系统。
PM-EMS型磁悬浮
PM-EMS型磁悬浮在轨道交通领域的典型应用是美国M3磁悬浮列车。M3磁悬浮列车系统是美国MagneMotion公司在Magplane技术基础上开发的,综合考虑了TR系列和HSST系列磁悬浮列车的优点。该系统采用了中低速长定子直线同步驱动、永磁悬浮和导向的单磁悬浮架构,旨在实现高效率、高灵活性和低成本的城市快捷运输。该列车可以以两辆、六辆或更多辆的编组形式运行,可直达目的地或进行中转,具有高度灵活性和全自动控制。
自2003年起,MagneMotion公司与美国联邦交通管理局合作,验证其专利技术的可行性。随后,MagneMotion公司提出了M3磁悬浮系统的详细初步方案,并在实验室中建造了小尺寸的原理车和试验线。2008年,MagneMotion公司宣布获得联邦交通管理局约630万美元的资助,用于开发时速达到100英里/小时的城市磁悬浮交通系统。M3全尺寸系统已在马萨诸塞州丹弗斯克莱斯特的12米长轨道上进行了室内测试,并在奥多明尼昂大学78米的室外轨道上进行了测试。尽管文献中出现了一张南京M3磁悬浮系统的实验样车和试验线图片,但其他文献和报道中未提及相关内容。
此外,中国科学院电工研究所、国防科技大学、西南交通大学等国内高校和科研院所也在PM-EMS型磁悬浮方面进行了深入研究,并完成了模型车的研制和测试等重要工作。
暗轨/吊轨永磁补偿式磁悬浮列车
暗轨/吊轨永磁补偿式磁悬浮是中国自主知识产权的创新技术。它不完全符合传统意义上的磁悬浮列车,因为它没有完全实现无机械接触,而是依靠永磁补偿式磁悬浮技术提供主要的磁悬浮力和导向力,并使用机械导向轮提供辅助的磁悬浮力和导向力。
经过李岭群团队17年的研发,他们申请了多项关于暗轨/吊轨磁悬浮方面的专利。在2004年8月,中国大连市科技局主持的“永磁补偿磁悬浮技术鉴定会”上对该技术进行了鉴定。经过进一步地研究实验,有望用于城内和城际区域交通,并建议通过建设实验线对相关技术进行验证。2004年10月,中国首辆具有完全自主知识产权的暗轨型磁悬浮样车“中华01号”在大连磁谷科技研究所内运行成功,轨道长56m,车长、车宽和车高分别为10。3m、3。12m和2。86m,设计时速110km/h,单车载客人数32人,且造价低于1亿元/km。2005年5月,大连磁谷科技研究所研发出“中华06号”轻型吊轨磁悬浮技术验证样车,轨道长70m,车长、车宽和车高分别为9。6m、1。65m和1。87m,设计时速可达400km/h,单车载客人数10人。“中华06号”轻型吊轨磁悬浮结构受力简单、材耗少,减轻了磁悬浮轨道和车体的重量,便于高速运行,有效降低了磁悬浮车运行成本,且造价约为0。8亿元/km,仅相当于TR系列磁悬浮造价的30%。
中国
北京磁悬浮S1线:2017年年底,北京首条中低速磁悬浮列车S1线正式开通,设计时速100km/h。北京中低速磁悬浮S1线北京中低速磁悬浮线中的“S”指市郊,S1线东起西四环定慧桥北五路,与地铁6号线衔接,经田村、石景山,西到门头沟区门城镇,全长19.
上海磁浮示范运营线:2002年,德国西门子公司牵头与中国上海磁浮交通发展公司合作建设了上海高速磁浮示范运营线。上海磁浮示范运营线是世界上唯一一条投入商业运行的高速磁浮线,磁浮列车车体按结构分为上部车体、夹层和走行机构三大部分。上海引入德国技术开通了磁浮示范运营线,时速达430公里/小时。
长沙磁浮快线:长沙磁浮快线全长18.55公里,连接长沙火车南站和长沙黄花机场。长沙磁浮快线是中国首条完全拥有自主知识产权的中低速磁浮商业运营铁路。
凤凰磁悬浮:2022年7月底投入运营的凤凰磁浮观光快线是中国国首条“磁浮+文化+旅游”的观光快线,连接凤凰高铁站与凤凰古城景区,最小转弯半径为50米,爬坡能力强,可适应70‰的坡度。
清远磁悬浮(建设中)

高温超导高速磁浮工程化样车及试验线:2021年1月13日,采用西南交通大学原创技术的世界首条高温超导高速磁浮工程化样车及试验线在四川成都正式启用。
中车青岛四方600千米磁浮试验列车:2019年5月,时速600公里高速磁浮试验样车已经在青岛下线,并实现了静态悬浮。
上海—杭州(规划中):中国铁路铁路研究人员或将在上海和杭州之间建造一条150公里的真空隧道,允许磁悬浮列车以高达1000公里/小时的速度行驶。
2023年11月,时速1000公里高速飞车试验线主体完工,进展顺利成功落地,上海到杭州只要9分钟。
日本
东部丘陵线:2005年3月,世界上第一条中低速磁悬浮交通线路——日本爱知县的东部丘陵线正式开始载客运营。该线路采用的是HSST(高速磁悬浮交通系统)技术,列车的最高行驶速度约为100公里/小时。同年,基于HSST-100L系列的Linimo磁悬浮列车开始在东部丘陵线上运营。该列车的全长为43.3米,高度为3.445米,能容纳244名乘客。
中央新干线(建设中):日本JR东海公司2027年将开通的品川(东京)-名古屋间的磁悬浮中央新干线实现无车票乘车。列车将反复以最高时速500公里的速度行驶,以期提高其性能。2013年8月29日已经正式试车在山梨县的试车线上进行。
美国
AMT Test Track(建设中):2016年美国航空航天局和波音公司元老为首创办的众包企业超回路列车运输技术公司(Hyperloop Transportation Technologies) (简称HTT)宣布,它已被获准使用被动磁悬浮技术,为其超高速列车提供关键技术支持。同其他超回路列车技术一样,HTT承诺将通过真空管道系统以最高每小时750英里的速度运送乘客或货物。
加州圣巴巴拉:Applied Levitation/Fastransit Test Track(建设中)
圣地亚哥(调试中)
联邦运输管理局(FTA)城市磁浮技术示范(UMTD)计划(调试中)
Union Pacific Freight Conveyor(规划中)
巴基斯坦
卡拉奇/拉瓦尔品第/瓜达尔(建设中)
拉合尔市中心—拉合尔机场(规划中)
德国
德国埃姆斯兰县:transrapid具有31.5公里的轨道,定期运转的速度最低 超过公里每小时。
其他国家的规划
澳大利亚墨尔本磁浮提案:2016年,美国高铁公司Hyperloop One提议在澳洲修建一条超音速磁悬浮铁路,联通悉尼与墨尔本,将两座城市间的旅途缩短至55分钟以内。
英国利物浦到曼彻斯提案:2017年,英国宣布将开建地下悬浮列车,时速每小时350英里(约合563公里/时),全程为31英里(约合50公里)。建成后,单程一次只需时7分钟。
印度孟买到新德里:这不仅会是印度的第一列磁悬浮,也会是南亚的第一列磁悬浮。2018年2月,英国维珍集团创始人理查德·布兰森宣布与印度马哈拉施特拉邦签订框架协议,拟在印度最大城市孟买与浦那之间修建首条真空管道高速铁路。 2020年在印度铁道部要求对该项目进行审查近一年后,孟买维卡斯铁路公司(MRVC)正计划通过一项公私合作(PPP)模式运行磁悬浮列车的提议。
韩国-仁川机场磁浮线:仁川机场磁浮线于2012年11月投入试运行。仁川机场磁浮线的运营标志着韩国成为世界上第二个实现中低速磁浮列车工程化和城市商业化的国家。
超高速真空管道磁悬浮
超高速磁悬浮列车作为一项新技术,目前尚处于探索验证阶段,离工程应用还有很长的路要走。即使真空管道运输系统因其在速度、节能和环保方面的潜在优势而具有巨大的未来潜力,但此系统仍处于早期阶段,因此仍有必要开展进一步的研究,以解决涉及车-轨耦合作用、推进、能源供应、车载储能、空气动力学、管道散热、管道密封、管内通信、噪声、车站、救援和应用领域的一系列技术问题。其中包括牵引和制动技术、悬浮和导向技术、管道-列车-气流-热耦合问题、通信和运控技术、管道建设和抽真空效率、过渡舱技术与中间站端口对接、低气压适应性技术以及安全与救援技术等。因此,需要进一步研究和开发这些关键技术,以实现超高速磁悬浮列车系统的工程应用。
超级高铁(Hyperloop)
超级高铁是一种基于磁悬浮原理的高速运输系统,其车体磁悬浮方案包括气垫磁悬浮和电磁悬浮等多种技术。超级高铁最早是在20世纪90年代由达里尔·奥斯特提出的真空管道运输技术概念,后来被埃隆·马斯克等人进一步发展和推广。自那时以来,多家公司和机构如HTT、HyperloopOne等纷纷加入研发超级高铁的行列。通过合作协议、演示和测试等方式,他们在推进系统、真空管道技术和建筑设计等方面取得了一定进展。此外,中国航天科技集团公司也开始研发超高速列车,计划开发最高运行速度达到2000km/h、4000km/h的超高速列车。不断的研究和发展使得超级高铁的概念越来越接近实现,一些试验线和乘客舱的建设也已经展开。虽然超级高铁仍面临技术挑战和进一步的研究工作,但它在未来高速交通领域具有巨大的潜力。
展开[1]熊嘉阳, 邓自刚 ( Xiong Jiayang, Deng Zigang). 高速 磁悬浮轨道交通研究进展 ( Research progress of high- speed maglev rail transit)[J]. 交通运输工程学报 ( Journal of Traffic and Transportation Engineering ) , 2021, 21 ( 1), 2021: 177-198.
[2]SMITH F S. Patent 859, 018[P]. 1907-7-2, 1907
[3]BACHELET E. Patent 1, 020, 942[P]. 1912-3- 19, 1912
[4]周富民 ( Zhou Fumin).考虑轨道若干因素的磁悬浮控 制研究 ( Research on levitation control considering some guideway factor)[D]. 长 沙: 国 防 科 学 技 术 大 学 ( Changsha: National University of Defence Technology) , 2009., 2009
[5]张延昭 ( Zhang Yanzhao). 德国磁悬浮列车研究概况 ( Survey of research on maglev train in Germany)[J]. 全 球科技经济瞭望 ( Global Technology and Economic Out- look) , 1993, ( 4), 1993: 9-12.
[6]曹卓娜 ( Cao Zhuona). 磁悬浮 “世界版图” ( The world map of magnetic levitation)[J]. 世界轨道交通 ( World Rail Transit) ,2017, ( 9), 2017: 48-49.
[7]苏晓 峰 ( Su Xiaofeng). 磁 悬 浮 列 车 的 发 展 及 应 用 ( Development and application of magnetic levitation trains)[J]. 铁道车辆 ( Railway Vehicle) , 2003, 41 ( 11), 2003: 14-17.
[8]江浩, 连级三 ( Jiang Hao, Lian Jisan).磁悬浮列车在 世界上的发展与展望 ( The development and prospect of maglev train in the world)[J]. 铁道学报 ( Journal of the China Railway Society) , 1991, ( 2), 1991: 95-101.
[9]何维杰, 龙跃君. 类比推理法的运用与电磁学的发展[J]. 湖南大学学报, 1991, (06): 123-127.
[10]罗亚菲. 日行千里话飞车——磁悬浮列车诞生始末[J]. 创新世界周刊, 2021, (02): 94-99+7.
[11]王中林, 邵佳佳. 非匀速运动物体系统的动生麦克斯韦方程组理论[J]. 中国科学:技术科学, 2023, 53(06): 803-819.
[12]饶颖宇. 低真空管道高温超导钉扎磁浮系统热压特性研究[D]. 西南交通大学, 2021. DOI:10.27414/d.cnki.gxnju.2021.002274.
[13]杨明皓. 600km/h高温超导电动磁浮车载YBCO超导磁体设计研究[D]. 北京交通大学, 2021. DOI:10.26944/d.cnki.gbfju.2021.001011.
[14]潘强强, 逯迈. EMS型磁浮列车悬浮静磁场电磁环境仿真研究[J]. 中国铁道科学, 2023, 44(02): 102-110.
[15]闫杨阳. EDS型磁悬浮列车磁轨关系及动力学建模[D]. 石家庄铁道大学, 2022. DOI:10.27334/d.cnki.gstdy.2022.000657.
[16]崔瑾. 后民权时代美国非裔警务人员的族群认同与职业认同建构——以美国非裔警察联盟为中心的历史考察[J]. 历史教学(下半月刊), 2021, (07): 25-34.
[17]张明慧. 电励磁直线同步电动机磁悬浮系统H_∞鲁棒控制的研究[D]. 沈阳工业大学, 2022. DOI:10.27322/d.cnki.gsgyu.2022.000237.
[18]马崇年. 蓬勃发展中的世界铁路(二)[J]. 铁道物资科学管理, 1999, (02): 59-61.
[19]于春龙. 激光检测系统中气动控制的改进[J]. 机械与电子, 2009, (06): 79-80.
[20]卞吉. 我国第一台载人磁浮列车制成[J]. 现代物理知识,1995,7 (4 ):43, 1995
[21]单子晓张. 磁悬浮列车向我们驶来[J]. 科学时代, 1996 (2 ):42-43, 1996
[22]林一平. 我国磁浮列车研制取得重大进展[J]. 交通 与运输,2017,33 (3 ):50-53, 2017
[23]柳贺. 中国磁浮交通产业发展概览[EB/OL]. [2021- 11-25]. http://www.istis.sh.cn/list/list.aspx?id=10218, 2021
[24]侯大伟. 中国首辆磁悬浮列车运行试验成功[J]. 发 明与创新 (综合版),2006 ( 6 ):27, 2006
[25]岳海霏. 我国首条自主研发磁悬浮铁路即将开通 “追风者”列车多项成果达到国际领先水平[J]. 科 技中国,2015( 12 ):44-45, 2015
[26]新华日报. 我国自研中低速磁悬浮问世 时速可达 140 公里[EB/OL]. [2021- 11-25]. https://news.sina. com.cn/c/2014-08-21/150930722637.shtml, 2021
[27]付敬懿. 长沙中低速磁浮快线开通试运营[J]. 城市 轨道交通研究, 2016,19 ( 6 ):116, 2016
[28]孙晨, 闫晓言. 军民融合落地生根, 北京 S1 线试运 营[J]. 人民公交,2018( 1 ):72-73, 2018
[29]张旭东. 我国将在 2020 年研制出时速 600 公里高 速磁浮样车[J]. 广东交通,2018( 1 ):46, 2018
[30]中国中车. 青岛高速磁浮交通系统[EB/OL]. [2021- 11-25]. https:. .//wwwcrrcgccc/sj/g16998/s30989/t323 860.aspx, 2021
[31]GOU J S. Development status and global competition trends analysis of maglev transportation technology based on patent data[J]. Urban Rail Transit ,2018, 4(3):117- 129, 2-18
[32]闻汇. 又一款高速磁悬浮列车试验[J]. 党史文汇, 2023, (04): 63.
[33]科技部:将研究形成时速600公里高速磁浮试验线方案.环球时报. [2023-12-16].
[34]陈贵荣, 龙志强. 日本低速磁悬浮列车发展[J]. 国外 铁道车辆,2008,45 ( 1 ):1-3, 2008
[35]刘少克, 常文森, 尹力明. 日本磁悬浮列车 HSST- 100 运行试验综述[J]. 机车电传动, 1997 ( 6 ):29-31, 1997
[36]宫崎聡夫, 张芳. 磁悬浮列车的液压制动装置[J]. 国 外机车车辆工艺, 2017(4 ):20-23, 2017
[37]巩京. 日本超导磁悬浮列车研究及进展[J]. 全球科 技经济瞭望,1995,9 (9 ):44-45, 1995
[38]中岛洋, 王渤洪. 日本磁悬浮铁路的开发现状[J]. 电 力牵引快报, 1994 (4 ):1-5, 1994
[39]观察者网. 日媒:未来高速磁悬浮市场,中日“水 火不容”[EB/OL]. [2021- 11-25]. http://news.sina. com.cn/o/2017-10-26/doc-ifynffnz2617008.shtml, 2021
[40]蓝建中. 日本超导磁浮列车时速创纪录[J]. 城市轨 道交通研究, 2015,18 ( 5 ):134, 2015
[41]马卫华, 罗世辉, 张敏, 等. 中低速磁浮车辆研究综 述[J]. 交通运输工程学报, 2021,21 ( 1 ):199-216., 2021
[42]詹佳雯. 中低速磁浮列车直线感应电机及悬浮电磁 铁分析[D]. 杭州: 浙江大学, 2019, 2-19
[43]于加兴. 磁悬浮列车用直线同步电机控制系统的研 究[D]. 成都: 西南交通大学, 2007, 2007
[44]舒光伟, Reinhold Meisinger. 德国电磁型磁浮列车 40 年回顾[J]. 上海应用技术学院学报 (自然科学 版),2012,12 (4 ):305-309, 2012
[45]MNICH P, 王渤洪. 德国和日本磁悬浮高速铁路系 统的现状和比较[J]. 变流技术与电力牵引,2001(6 ): 1-8, 2006
[46]LONG G A, FISKE O J, PADEN B E. Design of a small-scale prototype for a stabilized permanent magnet levitated vehicle[C]. / Proceedings of the Asme Dynamic Systems and Control Conference 2009, 2009
[47]武瑛严, 陆光, 徐善纲. Inductrack 磁浮技术及其在 磁浮列车系统中的应用[J]. 电气应用,2006,25 ( 1 ): 1-3, 2006
[48]RICHARD F. Toward more efficient transport: the inductrack maglev svstem[EB/OL]. [2021- 11-25]., 2021
[49]马伟明, 鲁军勇. 电磁发射技术的研究现状与挑战[J/OL]. 电工技术学报, 2023: 1-17. DOI:10.19595/j.cnki.1000-6753.tces.230470.
[50]杨杰, 杨星, 高涛, 胡海林. 电磁悬浮系统的改进线性自抗扰控制方法[J/OL]. 电机与控制学报, 2023: 1-12.
[51]潘强强, 逯迈. EMS型磁浮列车悬浮静磁场电磁环境仿真研究[J]. 中国铁道科学, 2023, 44(02): 102-110.
[52]胡道宇, 冯馨月, 张志华. 超导电动悬浮系统阻尼特性研究[J]. 中国电机工程学报, 200986
[53]薄凯, 陈俊全, 王东, 等. 常导型高速磁浮列车电磁系统参数优化设计[J]. 电机与控制学报, 2022.11
[54]陈安林, 张鸣, 朱煜, 等. 电动式磁悬浮动量球电磁场耦合分析[J]. 宇航学报, 1328
[55]王君香. 浅谈磁悬浮列车的原理及应用[J]. 科学技术创新, 2019, (15).
[56]高锋, 罗华军, 杨颖, 等. 强侧风下中速磁浮列车在高架桥上运行时的气动特性研究[J]. 城市轨道交通研究, 2021.09
[57]田武刚, 潘孟春, 陈棣湘, 等. 基于有限元法的高速磁浮列车优化设计[J]. 电气应用, 9560
[58]杜鹏程, 徐习东. 高速磁浮列车定子绕组感应电势研究[J]. 电力系统保护与控制, 3415
[59]安邦. 中低速磁浮列车再生制动及运行能耗仿真[D]. 湖南:国防科学技术大学, 2014: 10.
[60]张湘, 连级三, 张隶仑. 磁浮列车机械制动系统的自适应控制研究[J]. 铁道学报, 8360
[61]马家庆, 崔宸昱, 周大进, 等. 基于振动耗能的真空管道HTS磁浮列车能量回收方法研究[J]. 低温物理学报, 2017, 39(2): 38-42.
[62]赖晴鹰. 中速磁浮运控电一体化运行策略优化[D]. 北京交通大学, 2020. DOI:10.26944/d.cnki.gbfju.2020.003942.
[63]马红伟. 成渝中线高铁速度目标值研究[J]. 铁道标准设计, 2021: 1-5. DOI:10.13238/j.issn.1004-2954.202004110001.
[64]沙梦麟. 21世纪先进的绿色地面交通工具——磁悬浮列车[J]. 交通与运输, 2001, (01): 9-10.
[65]刘怡恒, 张和洪, 龙志强, 谢云德, 顾秋明, 傅随金. 基于改进跟踪微分器的磁浮列车悬浮控制研究[J]. 机车电传动, 2023, (02): 113-122. DOI:10.13890/j.issn.1000-128X.2023.02.013.
[66]唐晓丹, 何青, 聂焕, 廖景雯, 胡淑怡. 基于DSP的单铁磁悬浮实验平台设计与实现[J]. 技术与市场, 2022, 29(10): 34-36.
[67]张晋维. 基于电磁辐射理论的应用概述[J]. 黑龙江科学, 2022, 13(16): 25-27.
[68]潘强强, 逯迈. EMS型磁浮列车悬浮静磁场电磁环境仿真研究[J]. 中国铁道科学, 2023, 44(02): 102-110.
[69]李婧, 徐佳明, 刘康, 罗俊, 赵正伟, 龚天勇, 马光同. 高温超导直线同步电机电磁力仿真与实验研究[J/OL]. 中国电机工程学报, 2023: 1-12.
[70]翟明达, 李晓龙, 龙志强, 窦峰山. 基于Youla参数化的高速磁浮列车悬浮系统控制与优化设计[J]. 同济大学学报(自然科学版), 2023, 51(03): 341-350.
[71]王小农, 黄靖宇. 超导电动磁浮列车悬浮和导向特性[J]. 同济大学学报(自然科学版), 2022, 50(10): 1482-1489.
[72]潘强强, 逯迈. EMS型磁浮列车悬浮静磁场电磁环境仿真研究[J]. 中国铁道科学, 2023, 44(02): 102-110.
[73]曾华南, 汪萍萍. 中速磁浮列车牵引供电方案研究[J]. 现代城市轨道交通, 2022, (09): 41-46.
[74]李大森. 常导高速磁浮列车多运行姿态下电磁力分析及发电特性研究[D]. 北京交通大学, 2022. DOI:10.26944/d.cnki.gbfju.2022.000716.
[75]徐浩, 蔡文锋, 胡连军. 高速磁浮交通轨道结构组成及其功能分析[J]. 四川建筑, 2023, 43(02): 82-84.
[76]马伟明, 鲁军勇. 电磁发射技术的研究现状与挑战[J/OL]. 电工技术学报, 2023: 1-17. DOI:10.19595/j.cnki.1000-6753.tces.230470.
[77]本刊综合. 零高度飞行器——磁浮列车[J]. 发明与创新(中学生), 2016, (08): 7-9.
[78]刁正. 高中物理电磁学知识在生活中的应用分析[J]. 数理化解题研究, 2023, (12): 56-58.
[79]刘新, 邓自刚, 梁乐, 李凯文, 鲁浩, 郑珺. 基于斜置环形Halbach永磁轮的磁浮列车“悬浮-导向-推进”一体化方案设计[J]. 机车电传动, 2023, (02): 90-96. DOI:10.13890/j.issn.1000-128x.2023.02.100.
[80]唐文冰, 肖立业, 王粟, 张京业. 磁悬浮轨道交通中的磁悬浮导向方式研究综述[J]. 电工电能新技术, 2022, 41(05): 45-60.
[81]徐飞, 罗世辉,邓自刚 ( Xu Fei, Luo Shihui, Deng Zi- gang).磁 悬 浮 交 通 关 键 技 术 及 全 速 度 域 应 用 研 究 ( Study on key technologies and whole speed range appli- cation of maglev rail transport)[J]. 铁道学报 ( Journal of Railway) ,2019,41 ( 3), 2019: 40-49.
[82]孙友刚, 徐俊起, 贺祯宇, 李丰荥, 陈琛, 林国斌. 基于误差交叉耦合的多电磁铁悬浮系统滑模协同控制[J]. 西南交通大学学报, 2022, 57(03): 558-565.
[83]李益民 ( Li Yimin). 直线电机与磁悬浮驱动 ( Linear motor with maglev drive)[M]. 2018: 4-21.
[84]Glatzel K, Khurdok G, Rogg D. The development of the magnetically suspended transportation system in the federal republic of germany[J]. IEEE Transactions on Vehicular Technology, 1980,29 ( 1), 1980: 3-17.
[85]Suzuki S, Kawashima M, Hosoda Y,et al.HSST-03 sys- tem[J]. IEEE Transactions on Magnetics, 1984, 20 ( 5), 1984: 1675-1677.
[86]张志洲, 张惠霞 ( Zhang Zhizhou,Zhang Huixia).韩国 磁悬浮 列 车 发 展 ( Development of magnetic levitation trains in Korea)[J]. 国外铁道车辆 ( Foreign Railway Vehicle) ,2006,4 ( 3), 2006: 8-12.
[87]贺光 ( He Guang). EMS 型中速磁悬浮列车动力学建 模与导向能力研究 ( Dynamic modeling of the medium speed maglev train and research on the guidance ability)[D]. 长沙: 国防科学技术大学 ( Changsha: National University of Defence Technology) ,2016., 2016
[88]杨志华 ( Yang Zhihua). 中低速磁悬浮列车磁悬浮系 统仿真研究 ( Simulation research on suspension system of middle and low speed maglev train)[D]. 成都: 西南 交 通 大 学 ( Chengdu: Southwest Jiaotong University Press) ,2014., 2014
[89]王小农, 黄靖宇. 超导电动磁浮列车悬浮和导向特性[J]. 同济大学学报(自然科学版), 2022, 50(10): 1482-1489.
[90]Development of a
simple MAGLEV system for a low-speed wind tunnel[A]. // Proceedings of the 2015 IEEE International Confer- ence on Power and Advanced Control Engineering . 2015: 441-444.
[91]熊嘉阳, 邓自刚 ( Xiong Jiayang, Deng Zigang). 高速 磁悬浮轨道交通研究进展 ( Research progress of high- speed maglev rail transit)[J]. 交通运输工程学报 ( Journal of Traffic and Transportation Engineering ) , 2021, 21 ( 1), 2021: 177-198.
[92]Kyotani Y. Recent progress by JNR on maglev[J]. IEEE Transactions on Magnetics, 1998, 24 ( 2), 1998
[93]商福 昆 ( Shang Fukun). 宫 崎 实 验 线 新 磁 浮 实 验 车 MLU-002N ( New maglev test vehicle MLU-002N on the Miyazaki test line)[J]. 铁道机车车辆 ( Railway Loco- motive & Car) , 1995, ( 1), 1995: 58-60.
[94]Yoshioka H, Suzuki E, Seino H, et al. Characteristics of the dynamics of the MLX01 Yamanashi maglev test line vehicles[J]. Quarterly Reports of RTRI, 1998, 39 ( 2), 1998: 62-67.
[95]Kondo Y,Terai M,Nishikawa Y,et al.Development of a GM-type pulse tube refrigerator cooling system for super- conducting maglev vehicles[M]. 2005: 21-22.
[96]Kusada S, Igarashi M, Nemotoet K, et al.The project o- verview of the HTS magnet for superconducting maglev[J]. IEEE Transactions on Applied Superconductivity, 2007, 17 ( 2), 2007: 2111-2116.
[97]武瑛,严陆光, 徐善纲 ( Wu Ying, Yan Luguang, Xu Shangang).Inductrack 磁悬浮技术及其在磁悬浮列车 系统中的应用 ( Inductrack maglev technology and its ap- plication in maglev train system)[J]. 电气应用 ( Elec- trical Application) ,2006, 25 ( 1), 2006: 1-3.
[98]邓自刚, 李海涛 ( Deng Zigang, Li Haitao). 高温超导 磁悬浮车研究进展 ( Research progress of high tempera- ture superconducting maglev vehicle)[J]. 中国材料进 展 ( Materials China) ,2017,36 ( 5), 2017: 329-334.
[99]Wang J R,Wu M Z,May H,et al.High-Tc superconduc- tive vehicle for maglev model[J]. Rare Metal Materials and Engineering, 1998,27 ( 4), 1998: 240-242.
[100]Wang J, Wang S, Zeng Y, et al. The first man-loading high temperature superconducting maglev test vehicle in the world[J]. Physica C Superconductivity & Its Appli- cations,2002,378-381 ( 1), 2002: 809-814.
[101]Schultz L, Haas O D,Verges P,et al.Superconductively levitated transport system—The SupraTrans project[J]. IEEE Transactions on Applied Superconductivity, 2005, 15 ( 2), 2005: 2301-2305.
[102]Kuehn L,Haas O D,Berger D,et al.SupraTrans II: Test drive facility for a superconductor-based maglev train[J]. Elektrische Bahnen,2012, ( 110), 2012: 461-469.
[103]Sotelo G G,de Oliveira R, Costa F S, et al.A full scale superconducting magnetic levitation vehicle operational line[J]. IEEE Transactions on Applied Superconductivi- ty,2015,25 ( 3), 2015: 1-5.
[104]Deng Z. A high-temperature superconducting maglev ring test line developed in Chengdu, China[J]. IEEE Trans- actions on Applied Superconductivity, 2016, 26 ( 6), 2016
[105]刘文旭,李文龙,方进 ( Liu Wenxu,Li Wenlong,Fang Jin).高温超导磁悬浮技术研究论述 ( Discussion on research on high temperature superconducting magnetic levitation technology)[J]. 低温与超导 ( Low Tempera- ture and Superconductivity) ,2020,48 ( 2), 2020: 44-49.
[106]程虎 ( Cheng Hu).混合型 EMS 系统的低功耗磁悬浮 控制技术研究 ( Research on low power suspension con- trol technology of hybrid EMS system)[D]. 长沙: 国防 科学技 术 大 学 ( Changsha: National University of De- fense Technology) ,2005., 2005
[107]大连研发的磁悬浮技术领先 悬浮能力大耗能低. 搜狐, 2004
[108]李岭群 ( Li Lingqun). 暗轨永磁补偿式磁悬浮路-车系 统 ( Dark rail permanent magnet compensated suspension road-vehicle system ) : CN2723262Y[P]. 中 国 专 利 ( Chinese Patent) , 2005., 2005
[109]李岭群 ( Li Lingqun). 暗轨永磁双吸平衡补偿式磁悬 浮路-车系统 ( Dark rail permanent magnet double suc- tion balance compensation suspension road-vehicle sys- tem) : CN2725086Y[P]. 中 国 专 利 ( Chinese Pa- tent) ,2005., 2005
[110]李岭群 ( Li Lingqun). 吊轨永磁吸引磁悬浮和导向路- 车系统 ( Suspended rail permanent magnet attraction sus- pension and guide road-vehicle system) : CN1775602Y[P]. 中国专利 ( Chinese Patent) , 2006., 2006
[111]李岭群 ( Li Lingqun). 吊轨永磁双吸平衡补偿式磁悬 浮路-车系统 ( Hanger rail permanent magnet double suc- tion balance compensation suspension road-vehicle sys- tem) : CN1680135Y[P]. 中 国 专 利 ( Chinese Pa- tent) , 2005., 2005
[112]“中华 01 号”磁悬浮列车运行成功 ( The “China 01” maglev train runs successfully)[J]. 军民两用技术与产 品 ( Dual Use Technologies & Products) , 2004, ( 11), 2004: 10.
[113]宗平 ( Zong Ping).“中华 06 号”磁悬浮验证车运行 成功 ( The“China 06”maglev vehicle runs successfully)[J]. 军民两用技术与产品 ( Dual Use Technologies & Products) ,2005, ( 6), 2005: 13.
[114]武震, 李学, 庞峥. 融合STEAM理念和地域文化的物理教学——北京磁悬浮列车S1线科学探秘[J]. 中小学数字化教学, 2022, (02): 73-75.
[115]王祝堂, 余东梅. 轻合金助“飞”磁浮列车[J]. 轻合金加工技术, 2020: 1-5. DOI:10.13979/j.1007-7235.2020.11.001.
[116]张天博. 磁浮列车悬浮间隙上下界有限时间自适应控制[D]. 北京交通大学, 2022. DOI:10.26944/d.cnki.gbfju.2022.000066.
[117]刘齐山. 高速磁浮列车走行机构通信连接器腐蚀机理研究[J]. 新技术新工艺, 2022, (08): 69-73. DOI:10.16635/j.cnki.1003-5311.2022.08.013.
[118]胡玉坤. 高铁连通对劳动力要素空间错配的影响研究:理论与中国经验证据[D]. 上海财经大学, 2022. DOI:10.27296/d.cnki.gshcu.2022.001291.
[119]彭可心, 谭晓红. 跑出快节奏,干出“加速度”[N]. 湖南日报, 2023-01-06. DOI:10.28360/n.cnki.nhnbr.2023.000024.
[120]杨嘉威. 面向中低速磁浮列车的磷酸铁锂电池充电控制研究[D]. 北京交通大学, 2022. DOI:10.26944/d.cnki.gbfju.2022.000703.
[121]科技融合交通,浪潮云海携手凤凰磁浮让千年古镇焕发新机.人民政协网. [2023-06-14].
[122]中国新闻网.中国新闻网. [2023-06-14].
[123]百度安全验证.百家号. [2023-06-14].
[124]时速1000公里,上海到杭州仅9分钟!“超级高铁”将由中国实现?.搜狐. [2023-06-14].
[125]未来上海到杭州或只需9分钟.抖音短视频. [2023-11-18].
[126]司恩. 中低速磁浮列车紧急制动方案优化与思考[J]. 机电产品开发与创新, 2023, 36(03): 100-103.
[127]伍锐恒. 中速磁浮列车空心永磁直线同步电机的设计与分析[D]. 浙江大学, 2022. DOI:10.27461/d.cnki.gzjdx.2022.002225.
[128]邓晓庆. 高速磁浮用超导直线电机电磁特性研究[D]. 北京交通大学, 2022. DOI:10.26944/d.cnki.gbfju.2022.001030.
[129]日本磁悬浮中央新干线或将实现无车票乘车.中华人民共和国商务部. [2023-06-14].
[130]日本磁悬浮L0系列列车29日进行时速500公里的试车.中国铁道科学研究院. [2023-06-14].
[131]从洛杉矶到旧金山只需30分钟,最高每小时750英里,超回路列车要来了....搜狐网. [2023-06-14].
[132]磁浮原理.上海磁浮官方网站. [2023-06-14].
[133]【高科技带你飞】悉尼到墨尔本仅需55分钟!超音速磁悬浮列车实现超级大城!.搜狐号. [2023-06-14].
[134]英国拟开建最快地下磁悬浮列车 时速达560km/h.环球网. [2023-06-14].
[135]院士表态时速500公里高铁开发不出来 再度引发磁悬浮与管道高铁之争.新浪科技. [2023-06-14].
[136]中铁总中标印度新德里至孟买高铁可行性研究项目.中国政府网. [2023-06-14].
[137]张馨月. 基于多传感器信息融合技术的中低速磁浮测速测距技术[D]. 西南交通大学, 2021. DOI:10.27414/d.cnki.gxnju.2021.000954.
[138]邓自刚, 张勇, 王博, 等. 真空管道运输系统发展现 状及展望[J]. 西南交通大学学报,2019,54 ( 5 ): 1063- 1072, 2019
[139]沈志云. 关于我国发展真空管道高速交通的思考[J]. 西南交通大学学报, 2005,40 (2 ):133- 137, 2005
[140]王厚生, 杜玉梅, 夏平畴, 等. 电动式磁悬浮列车金 属板轨道结构的研究[J]. 中国电机工程学报,2005, 25 (7 ):162- 165, 2005
[141]超级 高 铁 ( Hyperloop ) 理 念 分 析 ( Analysis on the concept Hyperloop)[J]. 现代城市轨道交通 ( Modern Urban Rail Transit) ,2021, ( 4), 2021: 134-137.
[142]邓自刚, 张勇, 王博, 等 ( Deng Zigang, Zhang Yong, Wang Bo,et al.). 真空管道运输系统发展现状及展望 ( The development status and outlook of evacuated tube transportation system)[J]. 西南交通大学学报 ( Jour- nal of Southwest Jiaotong University), 2019, 54 ( 5), 2019: 1063-1072.
走词作者:走词先生,如若转载,请注明出处:https://zouci.cc/54082/